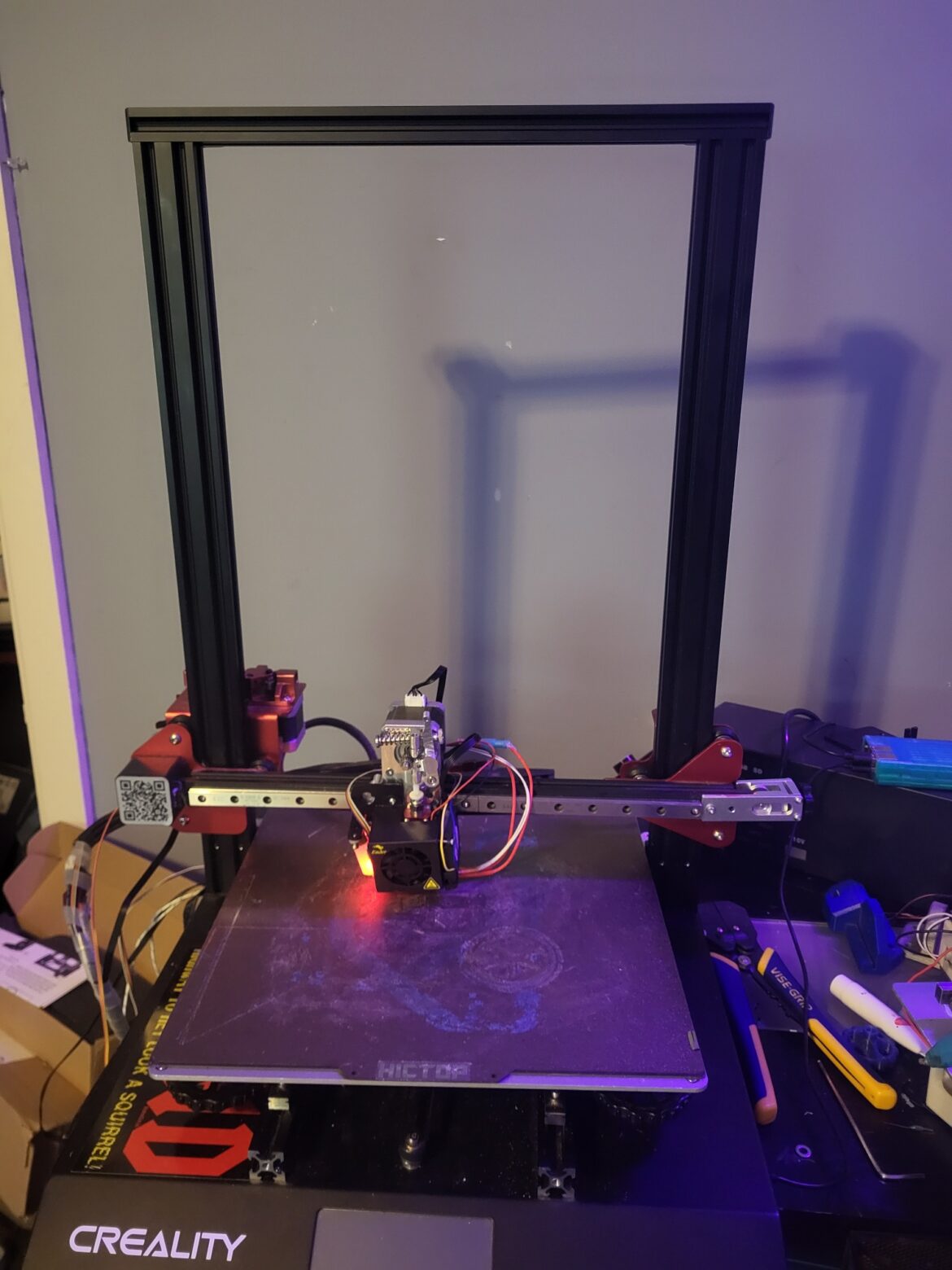
Below is my Klipper configuration I am currently working with on my CR10s Pro v1 modified system.
##############################
######## CONFIGS #############
##############################
[include mainsail.cfg]
[include KAMP_Settings.cfg]
[exclude_object]
[save_variables]
filename: variables.cfg ; variable storage file
;[include adxl345.cfg]
[include accelerometer.cfg]
############################################################
# #
# SYSTEM SETTINGS #
# #
############################################################
[mcu]
serial: /dev/serial/by-id/usb-Klipper_stm32g0b1xx_4E00410014504B5735313920-if00
#serial: /dev/serial/by-id/usb-FTDI_FT232R_USB_UART_AK06VNMQ-if00-port0
#serial: /dev/serial/by-id/usb-1a86_USB_Serial-if00-port0
#restart_method: command
[force_move]
enable_force_move: True
[virtual_sdcard]
path: /home/jessay/fozzy_data/gcodes
on_error_gcode: CANCEL_PRINT
[printer]
kinematics: cartesian
max_velocity: 300
max_accel: 3000
max_z_velocity: 5
max_z_accel: 100
#——————————-#
#—- STEPPER CURRENTS ——– #
#—– — DIGITAL SETTINGS —- #
# —————————– #
[stepper_x]
step_pin: PB3
dir_pin: !PB4
enable_pin: !PD1
microsteps: 16
rotation_distance: 40
endstop_pin: ^PC0
#endstop_pin: ^PC7
# position_endstop: See commonly edited settings at the beginning of the file
position_max: 285
homing_speed: 10
position_endstop: 0
[tmc2209 stepper_x]
uart_pin: PC11
tx_pin: PC10
uart_address: 0
run_current: 0.580
hold_current: 0.500
stealthchop_threshold: 999999
[stepper_y]
step_pin: PB10
dir_pin: PB2
enable_pin: !PB11
microsteps: 16
rotation_distance: 40
endstop_pin: ^PC1
#endstop_pin: ^PA2
# position_endstop: See commonly edited settings at the beginning of the file
position_max: 275
homing_speed: 80
position_endstop: 0
[tmc2209 stepper_y]
uart_pin: PC11
tx_pin: PC10
uart_address: 2
run_current: 0.580
hold_current: 0.500
stealthchop_threshold: 999999
[stepper_z]
step_pin: PB0
dir_pin: PC5
enable_pin: !PB1
microsteps: 16
rotation_distance: 8
#endstop_pin: ^PA7
#position_endstop: 0.5
position_max: 315
# position_endstop: See commonly edited settings at the beginning of the file
#position_max: 200
endstop_pin: probe:z_virtual_endstop
position_min: -9
homing_speed: 8
second_homing_speed: 3
homing_retract_dist: 8
[tmc2209 stepper_z]
uart_pin: PC11
tx_pin: PC10
uart_address: 1
run_current: 0.580
hold_current: 0.500
stealthchop_threshold: 999999
#—————————–#
#——- Extruder-Homing #
#——– #
#—————————–#
[extruder]
step_pin: PB13
dir_pin: PB12
enable_pin: !PB14
microsteps: 16
rotation_distance: 33.500
nozzle_diameter: 0.400
filament_diameter: 1.750
heater_pin: PC8
sensor_type: Generic 3950
sensor_pin: PA0
control: pid
pid_Kp: 21.527
pid_Ki: 1.063
pid_Kd: 108.982
min_temp: 0
max_temp: 250
[tmc2209 extruder]
uart_pin: PC11
tx_pin: PC10
uart_address: 3
run_current: 0.650
hold_current: 0.500
stealthchop_threshold: 999999
[bltouch]
sensor_pin: ^PC14
control_pin: PA1
x_offset: -46.3
y_offset: -7.1
z_offset: 0.9
speed: 10
lift_speed: 40
samples: 5
;pin_up_reports_not_triggered: True
;pin_up_touch_mode_reports_triggered: True
probe_with_touch_mode: True
# Old Sensor
#[probe]
#pin: PB4
#pin: !PD3
#deactivate_on_each_sample: False
#x_offset: -28 # as measured on the printer, the offset is actually 28mm
#y_offset: 0
#z_offset: 2.3 # this needs to be adjusted for each printer to achieve correct first layer height
#speed: 2 # very slow approach speeds are a MUST, even with a high quality capacitive probe; more so with OEM probe
#ift_speed: 1.0
#samples: 2 # this is excessive, but it satisfies my OCD tendencies
#sample_retract_dist: 9
#samples_tolerance: .4
#samples_tolerance_retries: 3
[input_shaper]
shaper_freq_x: 31.5 # stock CR-10S Pro with very well assembled and tuned mechanicals
shaper_freq_y: 34.0 # stock CR-10S Pro with very well assembled and tuned mechanicals
shaper_type: mzv
#[firmware_retraction]
#retract_length: 1.3 # Canadian Maker ToughPLA low sheen black @ 205 C, 20 mm/s
#retract_length: 1.5
#retract_speed: 50
#unretract_extra_length: 0
#unretract_speed: 25
[safe_z_home]
home_xy_position: 128, 139 # base 120×120, plus x and y offsets for bltouch to sit in the center
speed: 50
#z_hop: 27
#z_hop_speed: 5
#—————————#
#—— HEATBED/MESH ——#
#—————————#
[bed_mesh]
speed: 120
mesh_min: 0, 0
mesh_max: 300, 310
horizontal_move_z: 41 # 0.7~1.0mm is recommended
algorithm: bicubic
probe_count: 3,3
fade_start: 1
fade_end:20
fade_target: 0
mesh_pps: 2,2
bicubic_tension: 0.2
mesh_pps: 2
adaptive_margin: 0
[heater_bed]
heater_pin: PC9
sensor_type: EPCOS 100K B57560G104F
sensor_pin: PC4
control: pid
pid_Kp: 22.2
pid_Ki: 1.08
pid_Kd: 114
min_temp: 0
max_temp: 130
[bed_screws]
screw1: 25,30 # exact screw location based on the X&Y endstops defined above
screw2: 275,30 # exact screw location based on the X&Y endstops defined above
screw3: 275,270 # exact screw location based on the X&Y endstops defined above
screw4: 25,270 # exact screw location based on the X&Y endstops defined above
horizontal_move_z: 5.0
probe_height: 0.2 # use the Creality supplied 0.2mm feeler gauge for manual adjustment to avoid bed damage
speed: 80
probe_speed: 3.2 # can approach faster than bed mesh probing for a coarse manual screw adjustment
[filament_switch_sensor e0_sensor]
switch_pin: !PC15 #ar2
pause_on_runout: False
runout_gcode:
M600
[heater_fan nozzle_cooling_fan]
pin: PC7
[heater_fan controller_fan]
pin: PB15
heater: heater_bed
heater_temp: 45.0
[board_pins]
aliases:
# EXP1 header
EXP1_1=PB5, EXP1_3=PA9, EXP1_5=PA10, EXP1_7=PB8, EXP1_9=<GND>,
EXP1_2=PA15, EXP1_4=<RST>, EXP1_6=PB9, EXP1_8=PD6, EXP1_10=<5V>
[display]
lcd_type: emulated_st7920
spi_software_miso_pin: PD8 # status led, Virtual MISO
spi_software_mosi_pin: PD6
spi_software_sclk_pin: PB9
en_pin: PB8
encoder_pins: ^PA10, ^PA9
click_pin: ^!PA15
[output_pin beeper]
pin: PB5
#[output_pin stepper_xy_current]
#pin: PL3
#pwm: True
#scale: 2.0
#cycle_time: .000030
#hardware_pwm: True
#static_value: 1.3
#[output_pin stepper_z_current]
#pin: PL4
#pwm: True
#scale: 2.0
#cycle_time: .000030
#hardware_pwm: True
#static_value: 1.3
#[output_pin stepper_e_current]
#pin: PL5
#pwm: True
#scale: 2.0
#cycle_time: .000030
#hardware_pwm: True
#static_value: 1.25
#[static_digital_output stepper_config]
#pins:
# PG1, PG0,
# PK7, PG2,
# PK6, PK5,
# PK3, PK4
#[static_digital_output yellow_led]
#pins: !PB7
[gcode_macro START_PRINT]
gcode:
; Get first-layer bed-temp from slicer
{% set BED_TEMP = params.BED_TEMP|default(70)|float %}
; Get first-layer extruder-temp from slicer
{% set EXTRUDER_TEMP = params.EXTRUDER_TEMP|default(170)|float %}
G90 ; use absolute coordinates
M83 ; extruder relative mode
M104 S170 ; set extruder temp for bed leveling
M140 S{BED_TEMP} ; set bed temp
M109 S170 ; wait for bed leveling temp
M190 S{BED_TEMP} ; wait for bed temp
G28 ; home all axis
; mesh bed
BED_MESH_CALIBRATE PROFILE=adaptive ADAPTIVE=1
M104 S{EXTRUDER_TEMP}; set extruder temp
G0 Z50 F240
G0 X2 Y10 F3000
Smart_Park
M109 S{EXTRUDER_TEMP} ; wait for extruder temp
LINE_PURGE ; purge nozzle
[gcode_macro END_PRINT]
gcode:
G91 ; Relative positioning
G1 E-3 F1800 ; Retract
G1 F3000 Z3 ; Move up
G90 ; Absolute pos.
G1 X235 Y185; present print
# Turn off bed, extruder, and fan
M140 S0
M104 S0
M106 S0
SAVE_IF_SET ; SAVE_CONFIG if a mesh was probed in START_PRINT
M84 ; Disable steppers
#*# <———————- SAVE_CONFIG ———————->
#*# DO NOT EDIT THIS BLOCK OR BELOW. The contents are auto-generated.
#*#
#*# [probe]
#*#
#*# [extruder]
#*# control = pid
#*# pid_kp = 28.113
#*# pid_ki = 1.511
#*# pid_kd = 130.724
Synopsis
Yoshino Somei is the granddaughter of the head of a major yakuza clan in the Kansai region. When her grandfather arranges her marriage to Kirishima Miyama, the grandson of a powerful rival clan leader in Kanto, Yoshino is compelled to move to Tokyo. Though Kirishima appears warm and welcoming, almost making her forget his yakuza ties, a pivotal event will soon expose his true nature.
 List of mods
List of mods
- X Axis Linear Rail
- Y Axis Dual Linear Rails
- 4 linear rail carriage custom design for the bed
- Redid the wiring for easy connection and disconnection
- SKR Mini E3V3
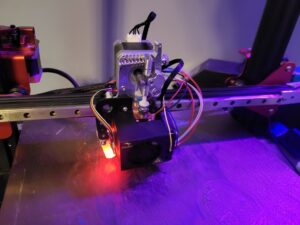
- Direct Drive
- BLTOUCH
- and more!